mechanics
For our mission, a spectrum of navigation modes are applicable. At one end of the spectrum lies pure teleoperation. Although this is feasible, as the Soviets showed in the 1960s with the Lunokhod program, the time delay proves troublesome and contributes to significant stress and fatigue for operators.
At the other end of the spectrum lies pure autonomy. Although research in autonomous vehicles has progressed dramatically, it has not yet produced techniques for safe, reliable operation of rovers using limited computing and sensing resources.
Our approach, called safeguarded teleoperation, occupies a position in the center of the spectrum. The safeguarded teleoperation framework is shown in the figure. In this approach, the user specifies high-level goals such as desired direction of travel, and the vehicle autonomously decides how to execute the command in a way that optimizes a performance criterion. The principal virtue of the approach is to enable safe and reliable operation, maintaining system integrity by avoiding environmental hazards and faulty uplink commands of the type that crippled the Phobos lander.
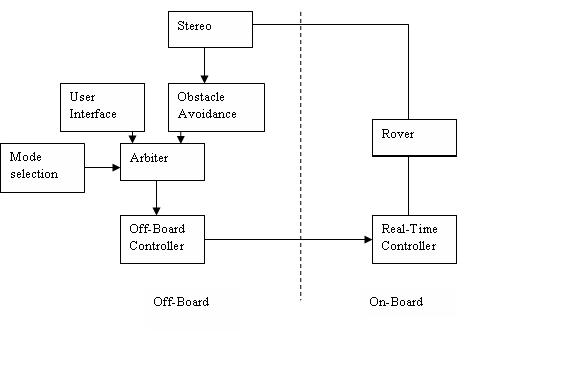
Fig. Safeguarded Teleoperation System Architecture
A stereo vision system is used provide the data necessary to determine the level of threat posed by a surface in front of the rover. The implemented four-camera system features an 80 degree field of view, and processes terrain data 4 to 8 meters in front of the vehicle at approximately 1 Hz, with a typical ground resolution of 8 cm. A local obstacle avoidance planner uses the stereo data to determine a path for the rover which poses the least threat to the integrity of the vehicle. To complement the stereo system and provide a redundant sensor, we have developed a laser-based hazard detection system. The implemented system provides data with ground resolution better than 1 cm at rates in excess of 4 Hz. We point the laser at the area some 75 to 125 cm in front of the vehicle, so that it cap detect the troublesome depressions like craters.
Hazard Metrics
Since the laser line hits the ground fairly close to the vehicle (approximately 100 cm in front of it), detection must be made quickly in order to react in time. For this reason, we have chosen to define simple heuristic metrics for each type of hazard that we want the laser to detect.
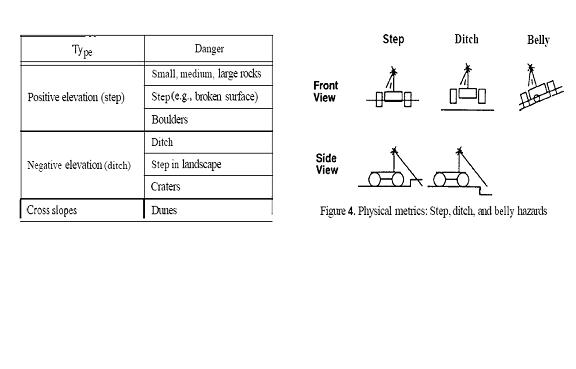
Fig. Terrain Types ans Physical Metrics
These metrics are defined in terms of a single scan of the proximity sensor, so that no information needs to be saved between scans. Also no information about the planned path of the rover is utilized nor is any dead-reckoning data used. The approach used evaluates whether the elevation of the surface in front of the rover (represented in the rover's local coordinate frame) exceeds the capability of the rover.
Structure / Material
Due to the unpredictable lunar terrain, the Vanguard is designed to be flexible for the proposed mission. The flexible design considered allows Vanguard to navigate most terrain it is likely to encounter and still be relatively small.
The frame is divided into three different sections allowing the frame to flex. Torsional springs are used at the hinges as a supplemented damping system. Each wheel has an independent suspension attaching it to the frame of Vanguard, acting as the primary damping system. This independent suspension acts as a mechanism to compact Vanguard for storage on the lander.
The main body of Vanguard is completely sealed from the elements. This allows protection from Lunar dust. A cooling system is implemented to channel the heat away from the sensitive components.
Drive / Steering
Each wheel has its own independent drive motor. This assures that Vanguard keeps in contact with the ground even on rough terrain as well as simplifies drivetrain design. Steering mechanisms are placed on the front and the rear sections to work in conjunction with variable speed motors. The wheels are constructed of a rigid metal strip attached to the hub by eight thin spokes. This design adequately supports the Vanguard and its cargo while maintaining traction and conserving mass.
Motor selected:
| Manufacturer | Model Number |
Max. Torque |
Modifications |
Maxon Motors |
REO16-039-08EA100A |
18.6 mNm |
Low |